導入前・スペック等に関するご質問
TQ-RoboDrive ILM/ILM-Eシリーズに関するご質問
- ILMシリーズとILM-Eシリーズの主な違いは何ですか?
-
ILMのステータはエポキシ樹脂で成形されており、ILM-Eは巻線が露出していて接着されています。また、ILM-Eは絶縁紙の代わりにプラスチックのポールキャップを使用しています。ILMステータにはTHTホールセンサーと温度センサーがあり、ILM-EにはSMDホールセンサーと温度センサーが含まれています。
- フレームレスモータはロボット等にどのように組み込みしますか?
-
ILMのステータは接着剤を使用してハウジングに組み込みます。ILM-Eのステータは収縮フィット方式でハウジングに組み込まれます。
ロータの組み込み方法は、ILMとILM-Eの両方で同じでシャフトに接着します。
こちらの動画を参考にしてください。 - フレームレスモータはどのカテゴリーのモータに属していますか?
-
フレームレスモータILMシリーズおよびILM-Eシリーズは、永久磁石同期モータ(PMSM)に属しています。
- フレームレスモータの定格電圧はどのように定義されていますか?
-
定格電圧は設計基準として定義されており、48V(ILM25/38の場合は24V)です。TQ社製フレームレスモータは「UL規格、EC指令、およびISO DIN EN基準」などの要件をすべて満たしています。
- フレームレスモータの電流値はどのように定義されていますか?
-
フレームレスモータは、20%の線形飽和を伴う4倍の過負荷容量を備えています。ピーク電流は、モータのトルクが公称値の20%まで連続的に低下する電流として測定されます。このピーク電流値を4で割ると、モータの定格電流が得られます。
- モータトルク定数とバックEMF定数の関係は?
-
モータートルク定数 kT{Nm/A}とバックEMF定数 kE{V/krpm}の関係は以下のようになります:
(√3/2) * (60/2π) * kE - 無負荷速度と誘導電圧の関係は?
-
誘導電圧は、モーターの無負荷速度に比例して線形に変化します。
- モータの電気的時定数を計算する方法は?
-
電気的時定数は、データシートに記載された端子抵抗と端子インダクタンスの値を使用して計算できます:
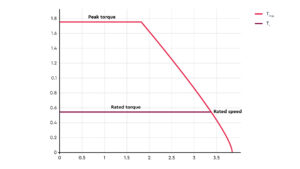
te = LTT/RTT - データシートのT-Nプロットからモータの定格速度を割り出す方法を教えてください。
-
基本仕様表ではモータは最大無負荷速度のみ記載しています。定格速度はデータシートの定格トルク時のT-Nプロットとの交点から参考値を割り出せます。
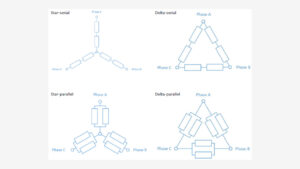
- TQフレームレスサーボキットの利用可能なステータ巻線構成は?
-
ステータ巻線構成は、ステータの12ピンにハンダ付けされた接続PCBで変更します。以下の接続オプションを提供可能です。
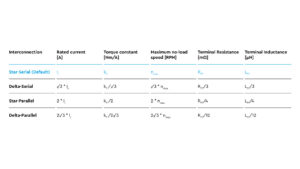
- 巻線接続の変更はモータのパラメータにどのように影響しますか?
-
供給電圧が一定の場合、定格トルクとピークトルク、銅損失、効率はすべての接続方法で一定です。接続方法によって変更されるその他のパラメータは、以下の表になります。
- なぜモータトルク定数はピークトルクで線形ではないのですか?
-
TQ社のテストベンチ測定によると、トルク定数はトルク範囲全体で線形ではなく、ピークトルクで20%の線形飽和に達する傾向があります。
- 定格電流はピーク値ですか、それともRMS値ですか?
-
データシートに記載されている定格電流値はピーク値です。
- モータ性能は周囲温度に応じてどのように変化しますか?
-
データシートのすべてのパラメータは、室温20~22℃で測定されています。S1曲線によると、周囲温度が上昇するにつれてモーターが連続トルクを発生させる能力が低下します。お客様のアプリケーションに適したモータサイズを選択する際に考慮する必要があります。
- TQ-RoboDriveフレームレスモータが高いトルク密度を達成した理由は?
-
以下の3つが主な理由です。
- オルソサイクリック巻線による非常に高い銅充填率
- 板金切断の精密な形状および銅と鉄の比率
- サーマルコンダクティブ接着剤によるステータとハウジング間の良好な熱接続および真空含浸によるステータ巻線の樹脂ポッティング
- TQ-RoboDriveフレームモータの銅損失はどのように計算されますか?
-
銅損失は、定常状態で以下の式を用いて計算されます:
PΩ = 3 * (Irated/√2)2 * RTT/2
- TQ-RoboDriveフレームモータの最大動作温度は?
-
TQ社製フレームレスモータの最大動作温度は125℃です。
- フレームレスモータには「ホールセンサ」および「温度センサ」を装着していますか?
-
ILM-Eシリーズはホールセンサと温度センサを装着しています。
ILMシリーズはホールセンサと温度センサはオプションとなります。
- サーボドライブ/インバータ側で必要な要件は?
-
TQ社のTQ-RoboDriveフレームレスモータには、正弦波駆動をサポートし、PWM周波数が16kHz以上であるサーボドライブ/インバータが必要です。
- 推奨するサーボドライブ/インバータはありますか?
-
TQ社ではElmo Motion ControlおよびSynapticonのサーボドライブ/インバータを推奨しております。その他のメーカーについてはお問い合わせください。
導入後のご質問
見積り・ご相談
協働ロボットやサービスロボットの開発・改良・内製化をご検討の方など、TQ-RoboDriveフレームレスモータの見積り、製品に関するご質問などお気軽にお問い合わせください。エンコーダ、安全ブレーキを組み込んだユニット化を含めたご相談についても承ります。