ASPINAデルタロボットは三角形をした可動範囲(デルタ型)の中で動かすことができるパラレルリンク構造のロボットです。
部品や製品の外観検査や接着剤の塗布など、多用途に利用できます。
直感的なソフトウェアで操作が簡単で、ワーク形状や大きさ、角度に応じたカスタマイズにも対応し、製造現場の人手不足解消に貢献します。

ASPINAデルタロボットの特長

一体型フレームとコントローラ内蔵のシンプルな構造により、省スペースで迅速かつストレスのない導入と設置。
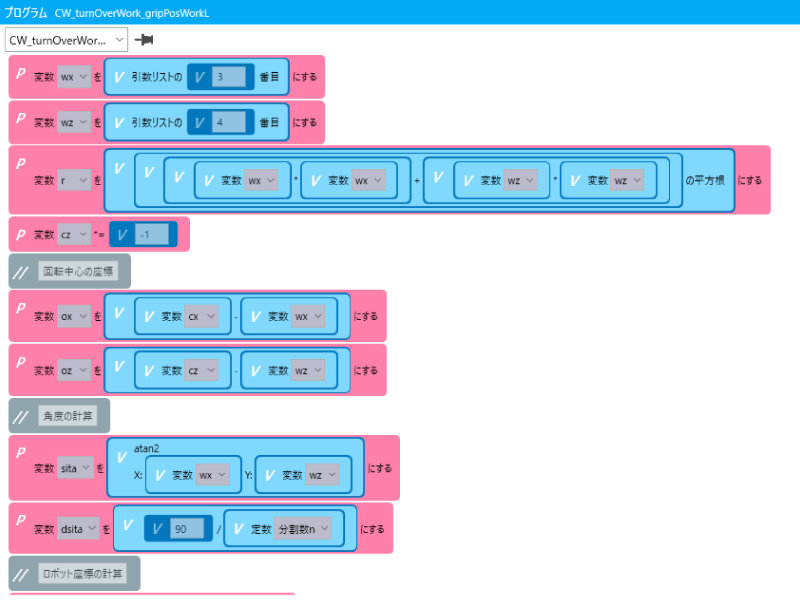
ビジュアルプログラミングを活用した直感的なインターフェースにより、ロボットの操作が非常に簡単。
豊富な作業パッケージを準備。ロボットハンド、アクチュエータ、カメラ、照明、ターンテーブル等、オプションとの組合せ次第で様々な検査に柔軟に対応可能。
主な用途例
目視検査の自動化
360度外周検査
6面全周の外観撮影
接着剤塗布の自動化
事例紹介
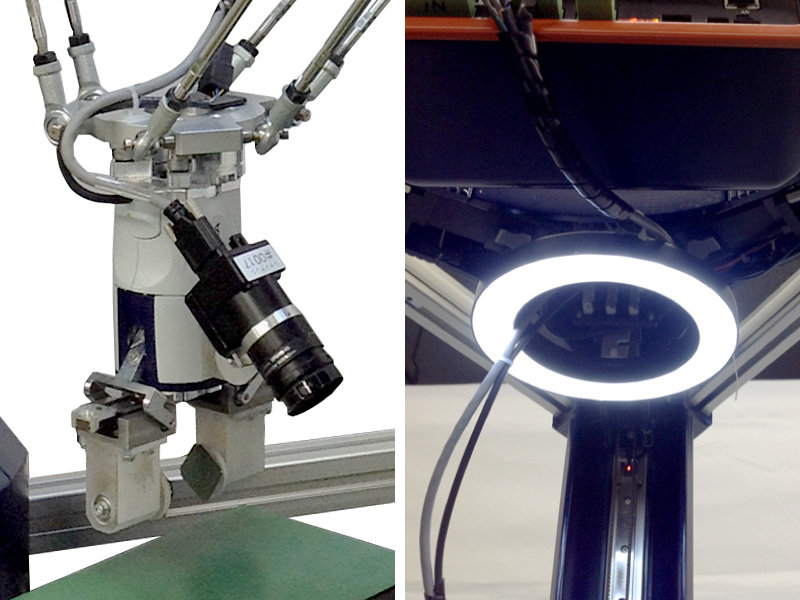
6面を隈無く外観検査するロボット
カメラ部にターンテーブルとロボットハンドを装着して検査ワークを反転させる機構で、 ワークの6面すべてを自動的に外観検査することが可能です。
その他の組み合わせ活用事例
仕様
ASPINAデルタロボット仕様
| 動作エリア | φ280 × 350㎜ XYZ(θ軸オプション) |
|---|---|
| 寸法 | 495mm × 433㎜ × 740mm |
| 可搬重量 | 最大3000gまで |
| 本体重量 | 約15㎏(コントローラ込み) |
| 駆動方法 | ベルト駆動 |
| 動作速度 | 最高300㎜/sec |
| 押しつけ力 | 最大170N(ロボット中央のZ方向) |
| 繰り返し停止精度 | ±50μm |
| 電源電圧 | DC24V±10% |
| 必要電流容量 | 3A~10A(3Aはロボット単体、10Aはツール/外部軸接続時) |
| I/O仕様 | デジタル接点入力11本、デジタル接点出力11本 |
| 通信インターフェース | RS485端子、LANコネクタ、USBタイプC |
| 外部インターフェース | 外付けオプション2台接続可(デジタル接点入力、デジタル接点出力、RS485) |
| その他 | フォースモード/PC・タブレットによるティーチング対応 |
外形図
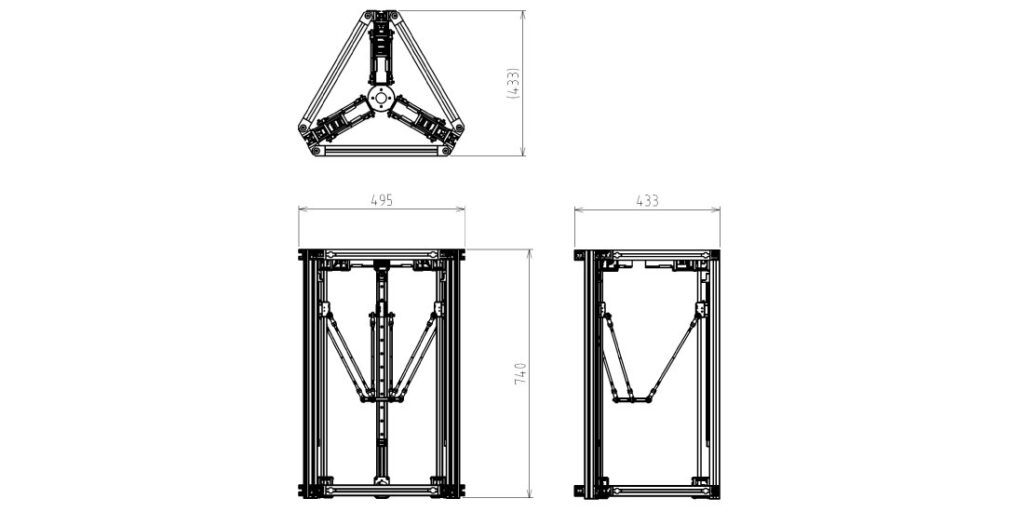
※すべての寸法の単位はmmです。
※品質向上のため断りなく仕様を変更することがあります。あらかじめご了承ください。
よくある質問
ASPINAデルタロボットの貸し出しは行っていますか?
はい。貸し出し、レンタルについてはお問い合わせフォームよりご相談ください。
ロボットをカスタマイズできますか?
はい。Z軸方向のカスタマイズがしやすい構造になっています。また、オプションのターンテーブルを追加したり、用途に合わせたカスタマイズにも対応できますので、お気軽にお問い合わせフォームよりご相談ください。
ASPINAデルタロボットはどの様な用途に使用できますか?
ASPINAデルタロボットは、さまざまなモジュールを簡単に取り付けることができ、多用途に対応します。例えば、自動組立装置として接着剤塗布工程での当社内での実績があります。また、別の用途例として、カメラやターンテーブルを装着することでワークの全周を撮影する外観検査の用途にも活用できます。その他にも幅広い用途でご利用いただけます。詳細やご不明点については、お気軽にお問い合わせフォームよりご相談ください。
資料ダウンロード
製品紹介資料をご希望の方は下記よりダウンロードしてください。
お問い合わせ
ASPINAデルタロボットについてのご質問、製品のレンタルなどお気軽にお問い合わせください。