人が作業するエリアでの搬送
組み立てライン
協働エリアへの搬送ロボットの進入
ワーク搬送
障害物(モノ・ヒト)回避

多くのAGV は、搬送エリアと人の作業エリアとを明確に分けて運用する必要があります。一方AMRは、人や障害物を認識して自動的に回避しながら走行し目的地へ向かいます。そのためAMRは、人が作業または人の往来があるエリアでの搬送の自動化ができます。
狭い通路や場所への搬送
自動ドア
狭い通路
作業台車・障害物の回避
作業者とすれ違い
作業部屋への出入り

小さな工場や古くからある工場は、作業者が通れる必要最低限の通路のみとなっているエリア・環境もあります。狭い通路や場所に対応した最適なAMRを選択すれば、そういった環境でも搬送を自動化することが可能です。
リフトモデルで自動ピックアップ
自動ピックアップ
リフター搭載AMR
台車搬送
ライン間搬送
基板・FOUP
台車と連結

AspinaAMR85L(リフトモデル)は、AMRが搬送物を自動でピックアップするため、AMRを効率よく稼働することができます。
搬送方式に合わせた300専用モジュール
自動ピックアップ
台車搬送
棚搬送
カート牽引

AspinaAMR300は搬送ニーズに合わせて、多彩な搬送方式に対応するモジュールをご用意しています。AMRが搬送物を自動でピックアップするため、AMRを効率よく稼働することができます。
装置や生産設備と連携
工場設備と連携するAMR
AMRと設備との間で移載
コンベヤ搭載AMR
AspinaAMRは単なる搬送作業の自動化にとどまらず、搬送物の受け渡しを行う工場側の設備と連携させることで、工程全体の自動化をさらに推進できます。
コンベヤ移載時の動作を解説
工場設備と連携するAMR
AMRと設備との間で移載
ローラーコンベヤ付AMR
AMRとPLC(シーケンサ)

ローラーコンベヤ搭載AMRと検査設備側のコンベヤ間で荷物を受け渡す連携動作を解説しています。
レイアウトや工程変更が頻繁にある現場の搬送
少量多品種
小ロット生産
レイアウト変更
ガイドレス(誘導体不要)

生産現場によっては、多品種小ロット生産で、頻繁に段取り替えや工程の変更、またレイアウトの変更がある場合があります。AGV を使用する場合は、磁気テープなどの誘導体をそのたびに貼り替える必要があります。また磁気テープは破損した場合に張り直さなければなりません。AMR であれば磁気テープや誘導体が不要で、環境地図を再作成し目的地を再設定するだけで、簡単に新しい環境で搬送を再開することができます。
エレベータと連携して複層階へ搬送
小荷物専用昇降機
エレベータ
複層階工場
環境地図の切り替え

AspinaAMRによる搬送作業の自動化は、単層階の工場にとどまらず、2階建てや3階建てなど製造現場が複数階に分かれる工場でも、エレベータや荷物用リフトと連携することで実現可能です。
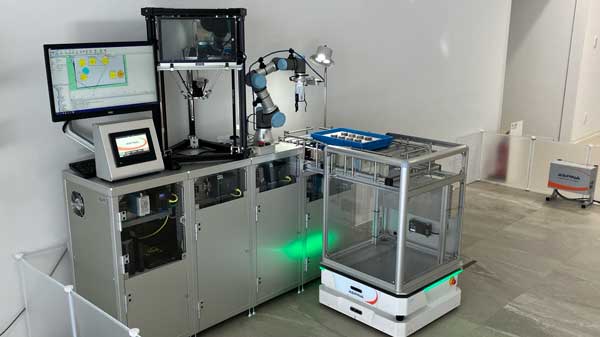
モバイルマニピュレータ(自走アームロボット)
モバイルマニピュレータ
ロボットアーム搭載AMR
自走アームロボット
搬送+ピッキング作業

AspinaAMRに協働ロボットを搭載したモバイルマニピュレータは、荷物搬送のみならず、移動先での荷物のピックアップや機械装置のボタン操作など、より高度な作業を自動化できる自律移動ロボットです。