- ユニバーサルロボットとの接続で、どのような通信・制御ができますか?
-
ロボットの種類と制御方法によって接続が変わります。
ユニバーサルロボットではロボットの先端に「ツールI/O」というコネクタがあります。
このコネクタは電源供給や制御信号を送受信するものですが、ロボットのシリーズによって使用できる制御信号が異なります。ロボットの種類と制御方法
eシリーズ:通信・I/Oどちらにも対応。
CBシリーズ:I/Oのみ対応。
CBシリーズで通信制御をする場合はロボットハンドとロボットコントローラを接続します。ユニバーサルロボットへの結線
UR専用ケーブルもしくは、標準ケーブルを使用して接続します。
①eシリーズ:ツールI/O使用時
通信制御可能、I/O制御可能②CBシリーズ:ツールI/O使用時
I/O制御可能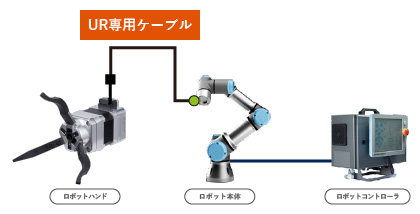
③CBシリーズ:ロボットコントローラ使用時
通信制御可能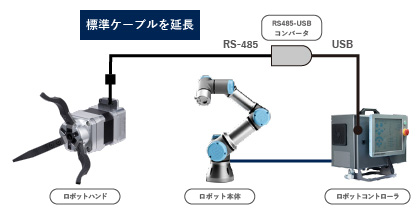
接続外観図
ツールI/O接続外観

ロボットコントローラ接続外観
ロボットハンドからケーブルを延長し、ロボットコントローラ内でUSB – RS-485コンバータで接続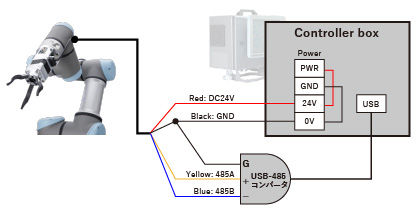
見積・ご相談
ロボットハンド設定や各メーカーロボットへの取り付け・接続などのご質問やご相談、見積りなどお気軽にお問い合わせください。