
ファナック協働ロボットCRXシリーズでの制御方法
ロボットハンド製品別ファナック協働ロボットCRXシリーズでの制御方法
| シリーズ | 製品型番 | 通信制御(プラグイン) | I/O制御 | |
|---|---|---|---|---|
| 2爪モデル | ARH250D-P40 |  | 〇 | 〇 |
| ARH250D-P80 |  | 〇 | 〇 | |
| ARH205D-P40 |  | 〇 | 〇 | |
| ARH205D-P80 |  | 〇 | 〇 | |
| 3爪モデル | ARH350A |  | 〇 | 〇 |
| ARH305B |  | 〇 | 〇 | |
| ARH305A |  | 〇 | 〇 | |
ファナック協働ロボットCRXシリーズ以外の産業ロボットの場合は、Modbus RTU(RS-485)接続で通信制御またはI/O接続でI/O制御可能です。
設定・接続に関連するデータ
ASPINA電動ロボットハンド設定やFANUC Robot CRX seriesと接続するためのデータです。
通信制御(プラグイン)
| メーカー | 画像 | 対応製品 | プラグイン 取扱説明書 | プラグイン 専用ファイル形式 | ダウンロード | |
|---|---|---|---|---|---|---|
| ファナック(FANUC) CRX series |  | ARH250D-P40 | | 〇 | 〇 | ダウンロード |
| ARH250D-P80 | | 〇 | 〇 | |||
| ARH205D-P40 | | 〇 | 〇 | ダウンロード | ||
| ARH205D-P80 | | 〇 | 〇 | |||
| ARH350A | | 〇 | 〇 | ダウンロード | ||
| ARH305B | | 〇 | 〇 | ダウンロード | ||
| ARH305A | | 〇 | 〇 | |||
I/O制御
I/O制御する場合はWindows用Setupアプリをダウンロードしてください。
ファナック協働ロボットCRXシリーズ接続用オプション
ロボットハンドを接続するために必要なオプション部品をご紹介します。
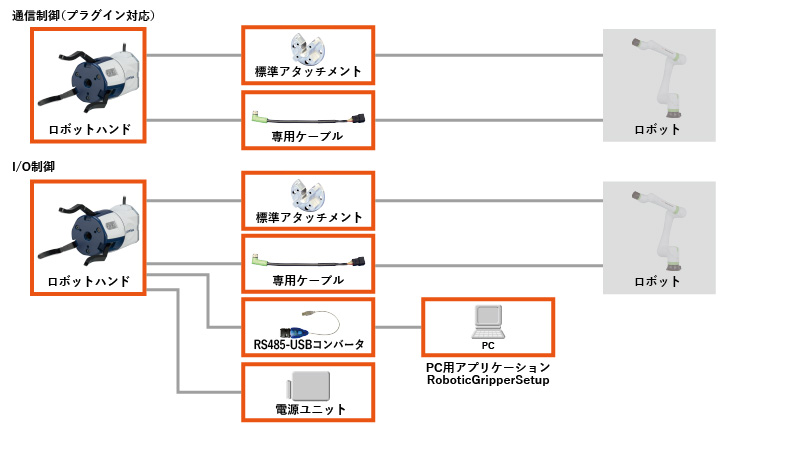
I/O制御を行う場合は基本的にPCで専用アプリからパラメータ設定が必要になります。
PC用アプリを使用して設定を行う際に「電源ユニット」と「RS-485 – USBコンバータ」が必要になります。
ファナック協働ロボットCRXシリーズでの活用事例
ファナック協働ロボットCRXシリーズにASPINA電動ロボットハンドを取り付けて様々なワークを把持する様子を動画でご紹介します。
ファナック協働ロボットによる把持作業
見積り・ご相談
ロボットハンド設定や各メーカーロボットへの取り付け・接続などのご質問やご相談、見積りなどお気軽にお問い合わせください。