ロボットハンドの制御方式について
ASPINA電動ロボットハンドを制御する方式は大きく分けて2種類あります。
- 通信制御:
-
1動作毎に動作指令を送る事ができます。動作指令は位置、把持力、開閉速度、把持チェックを動作毎に切り替えられます。Plug&Playに対応しているロボットは各ロボット専用プラグインソフトウェアをインストールする事で簡単に制御できます。未対応の各社ロボットに対してもPLC等のコントローラからModbus RTUを用いて設定することで制御可能です。
- I/O制御:
-
Input信号のON/OFFによって、ロボットハンドのメモリから設定した動作パターンを呼び出します。入力ピンによって1pin(2パターン)、2pin(4パターン)、3pin(8パターン)の設定が可能です。位置、把持力、開閉速度、把持チェック、オートグリップ機能の設定等はPCの専用アプリで設定し、ロボットハンドのメモリに事前に記録しておきます。
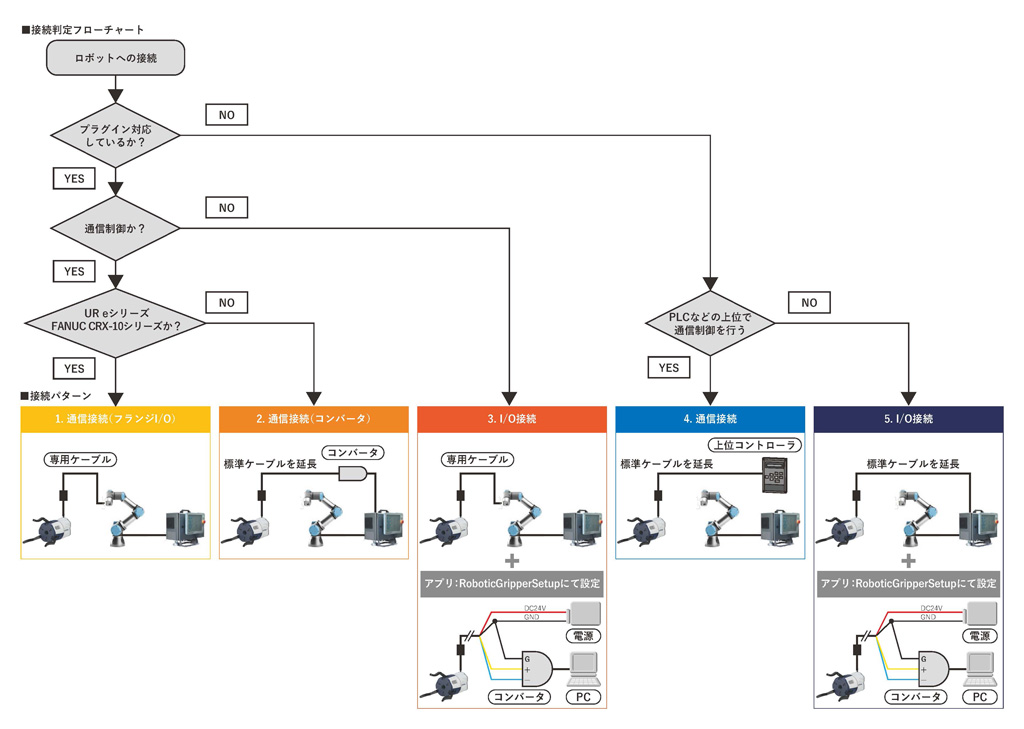
接続判定フローチャート
ASPINA電動ロボットハンドの各社協働ロボット・産業ロボット・他の装置への接続方法判定チャートです。
接続判定フローチャートを参考に”接続パターン”を選択してください。
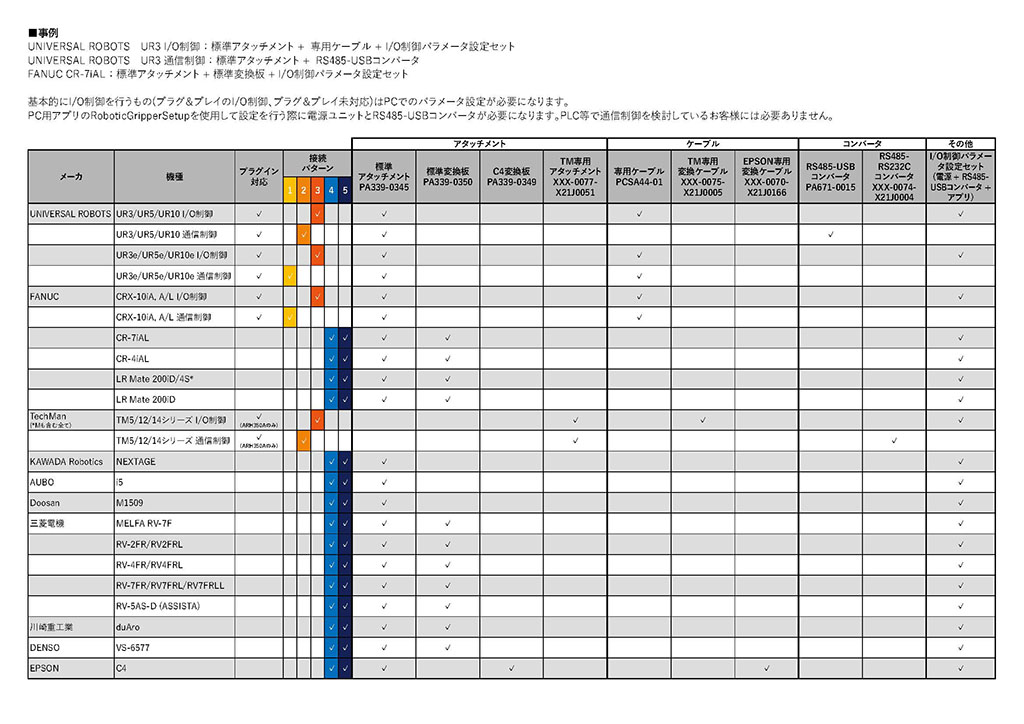
その後一覧表から接続するロボットの”メーカ・機種”と”接続パターン”よりオプションを選択してください。
ロボットメーカーから選ぶ
制御方式、取り付けに必要なオプションなど、ASPINA電動ロボットハンドとの接続方法をご紹介しています。
ユニバーサルロボット
Techman Robot

ファナック

安川電機

カワダロボティクス

EPSON

川崎重工

デンソーウェーブ

上記以外の接続の場合、Modbus RTU(RS-485)接続で通信制御またはI/O接続でI/O制御可能です。
見積り・ご相談
ロボットハンド設定や各メーカーロボットへの取り付け・接続などのご質問やご相談、見積りなどお気軽にお問い合わせください。