角型ワークにおすすめの2爪ハンド
安定してつかめる最大開口幅 150mm、
把持力 55Nのモデルです。

特長
大きな把持力と大きなストローク

把持力55Nで3kg程度のものがつかめます。
また開口幅も150mmと大きいため、様々なワークの把持が可能です。
ブレーキ機能

電源が落ちても機械的に保持します。
これにより不意の停電でもワークの落下を防ぎます。
細かな把持力調整

トルク、位置、速度をそれぞれ設定可能です。
トルクは0.5%単位、位置と速度は0.1%単位で調整が可能です。
追加機能として、押し込み運転や把持対象の落下検知も可能です。
豊富なカスタマイズ性
オプション取付可能な形状(オプション座面)となっているため、固定爪など取付が可能です。また、可動部の爪取り替えも簡単に行えます。
機能紹介
オートグリップ機能
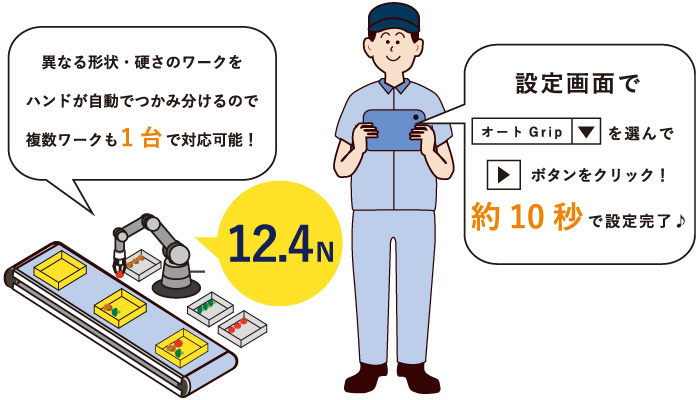
異なる形状・硬さのワークをロボットハンドが自動でつかみ分けます。
中空構造
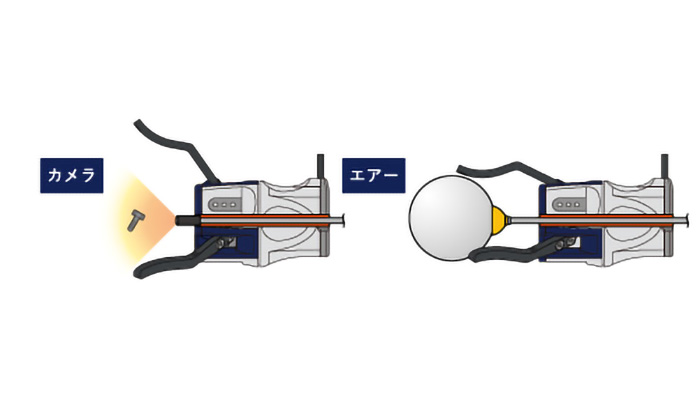
中空構造を利用して様々なカスタムが可能
把持エラー

把持エラー範囲設定により把持エラー出力可能
二段階運転
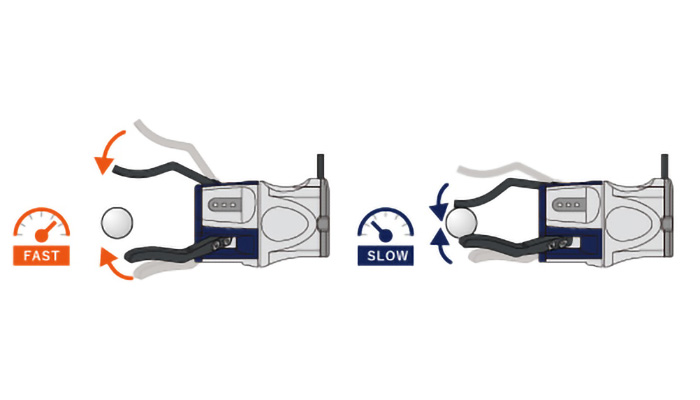
1回の動作中に2パターンの速度が設定可能
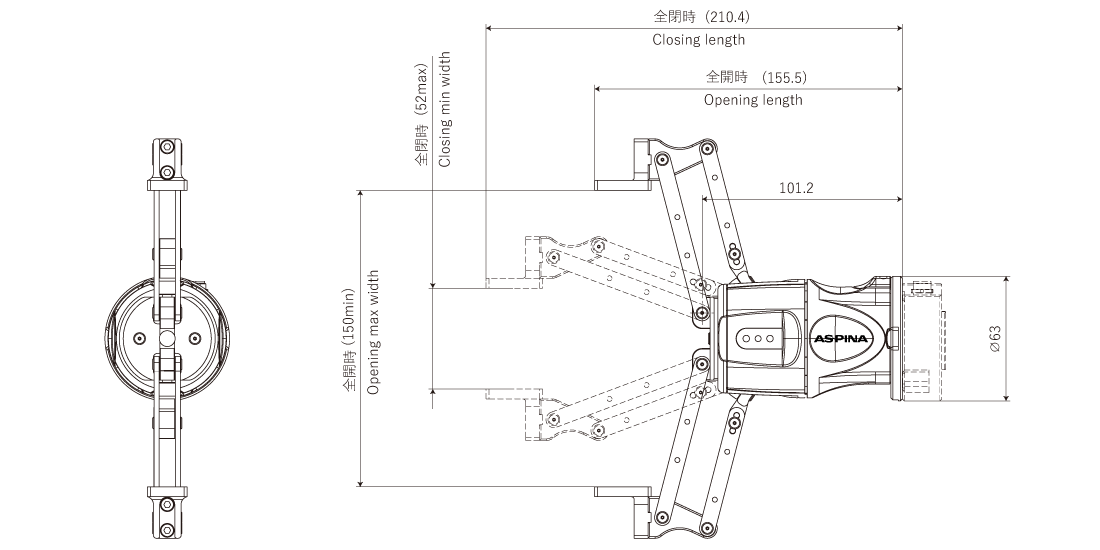
| 最大開口幅 ※1 | 150mm |
| 把持力 ※2, 3 | 55N |
| 最大把持重量 ※3 | 1,000g |
| 最大可搬重量 ※3, 4 | 3,000g |
| 本体サイズ ※5 | φ63 x 210mm |
| 重量 | 762g |
※1 標準爪取り付け時、詳細は図面を参照
※2 1本の爪 開口50°位置におけるtypical値
※3 上方から対象物を把持時、爪やワークの形状により異なります
※4 ワークを引っ掛けて把持する際に機構的に許容される重量
※5 可動部を除く
協働ロボットとの接続
電動2爪ロボットハンドARH250D-P80と各社協働ロボットとの接続方法や制御方法についてご紹介します。プラグ&プレイは順次開発予定です。詳しくはお問い合わせください。






その他の協働ロボット、産業ロボット、PLCなどの自社製造装置との接続は、Modbus RTUによる通信制御またはI/Oで制御できます。
活用事例
ASPINA電動ロボットハンドで様々なワークを把持する様子を動画でご紹介。
オプションの爪パーツや2爪/3爪の違いや、やさしくつかめる5Nモデルなどの他機種の活用事例もご覧になれます。


見積り・ご相談
ロボットハンド設定や各メーカーロボットへの取り付け・接続などのご質問やご相談、見積りなどお気軽にお問い合わせください。