コントローラ内蔵でコンパクトな設計となっており、使い方もデジタル入力信号のみで簡単です。最大開口径がφ116と広く、針や綿棒などの小さいものから、爪のカスタムを行うことで約500gまでの重さに対応できます。

特長
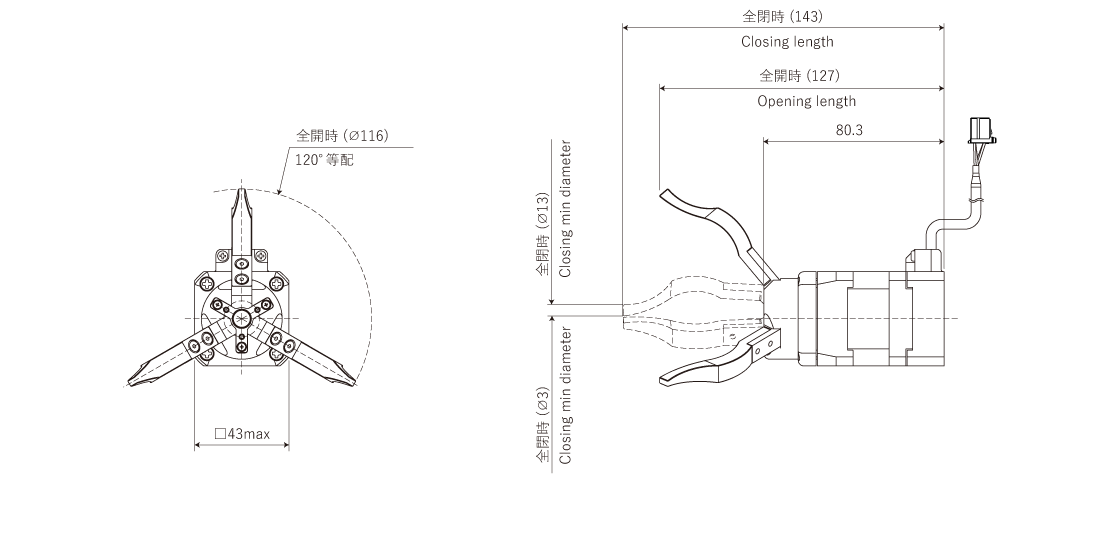
大きなストローク

小型でも大きなストローク(φ116)を確保。広い可動範囲で、大小さまざまなワークを1つのハンドで内径でも外径でも把持可能です。
調整可能な把持力調整

ステッピングモータを用いたサーボシステムによる把持力・動作速度・位置制御
作業の幅を広げる“中空構造”
中心に穴が開いた中空構造なので、様々なカスタマイズが可能です。
機能紹介
中空構造
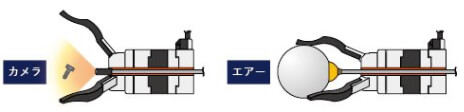
中空構造を利用して様々なカスタムが可能
把持エラー

把持エラー範囲設定により把持エラー出力可能
二段階運転
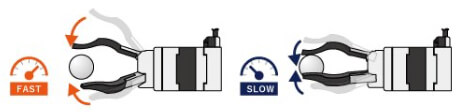
1回の動作中に2パターンの速度が設定可能
| 最大開口径 | φ116mm |
| 把持力 ※1 | 5N |
| 最大つまみ把持重量 ※2 | 50g |
| 最大つかみ把持重量 ※3 | 300g |
| 重量 | 470g |
※1 1本の爪30mmの位置にて
※2 70mm先端(ワーク材質によって変わります)
※3 30mm点(ワーク材質によって変わります)
協働ロボットとの接続
電動3爪ロボットハンドARH305Aと各社協働ロボットとの接続方法や制御方法についてご紹介します。プラグ&プレイに対応した協働ロボットなら設定も簡単です。

その他の協働ロボット、産業ロボット、PLCなどの自社製造装置との接続は、Modbus RTUによる通信制御またはI/Oで制御できます。
対応オプション
各社ロボットアタッチメント
各社ケーブル
活用事例
ASPINA電動ロボットハンドで様々なワークを把持する様子を動画でご紹介。
オプションの爪パーツや2爪/3爪の違いや、安定してつかめる50Nモデルなどの他機種の活用事例もご覧になれます。
見積り・ご相談
ロボットハンド設定や各メーカーロボットへの取り付け・接続などのご質問やご相談、見積りなどお気軽にお問い合わせください。