オートグリップ
把持力 自動調整
「オートグリップ」機能で錘と紙コップを把持してみました。
「オートグリップ」は、1つの動作指令で異なる種類の複数のワークをつぶさずにつかむことができる機能です。
オートグリップ機能ON /OFFでの把持動作を比較しています。
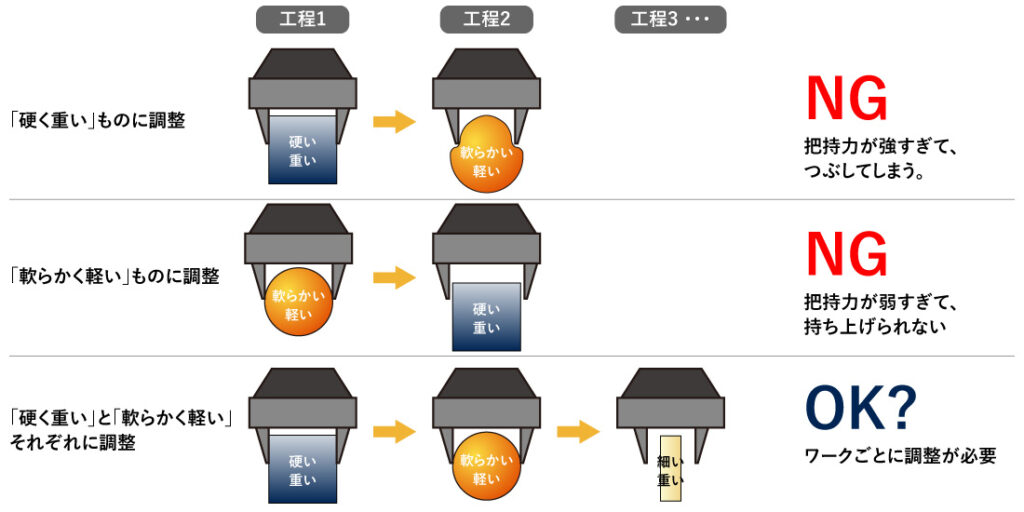
実は難しい?「つかむ」という動作
人間なら簡単にできる「つかむ」という動作、実はロボットハンドにはとても難しかったりします。
最初の工程でつかめても、次の工程で失敗する事が有ります。
「オートグリップ」機能なら色々つかめる!
電動3爪ロボットハンドの新機能「オートグリップ」なら、
ひとつの爪、ひとつの動作指令で「硬・軟・大・小・形状」の異なるワークをつかむことが可能です。
爪がワークに接触した時に検知した結果をもとに、つかむ力を最適化します。
カメラやセンサなどは不要。ロボットハンドが自立的に把持力を調整してワークをつかみます。

見積り・ご相談
ロボットハンド設定や各メーカーロボットへの取り付け・接続などのご質問やご相談、見積りなどお気軽にお問い合わせください。