- ユニバーサルロボットでロボットハンド設定はどのように行いますか?
-
設定方法についてご説明します。
ユニバーサルロボットの操作用ソフトウェア「URCaps」での設定について説明します。
チャプター1ではURCapsの導入と初期設定について、チャプター2はツールI/O、チャプター3は通信制御についての説明です。1. URCaps導入方法
1.1. 設置とインストール
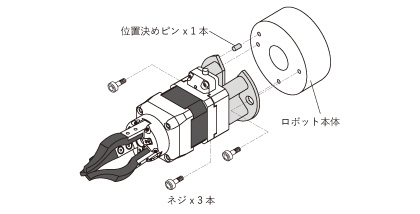
・ロボットへの取り付け
・接続ケーブルの配線
・URCapsをダウンロード
・ロボットにインストールする
1.2. 設置設定
設置設定画面で「通信の有効/無効」や「ツールI/Oの有効/無効」を選択

1.3. プログラムへのコマンド追加
URCapsのメニューからコマンドをタップ
- ツールI/O操作の場合「ARH Tool I/O」
- 通信操作の場合「ARH Communication」

1.4. コマンドの設定
コマンド画面をタップして調整

2. ツールI/O
ツールI/Oでできること
ロボットハンド操作
- デジタル接点信号オンオフによるハンド開閉操作
- グリップエラー信号を監視しての把持動作チェック
2.1. ツールI/O制御
ツールI / Oでロボットに接続する
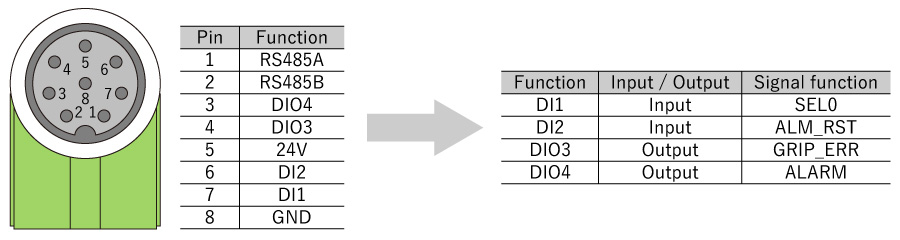
図のように、専用ケーブルでロボットツールI/Oとロボットハンドを接続します。
専用ケーブルのピン配置と機能は以下の通りです。また、ロボットグリッパーの入力/出力信号の割り当てと信号機能も示します。(工場出荷時の設定)
ツールI/Oでのロボットハンド操作

2.2. パターン選択
パターン番号を選択
・デジタル出力0,1のオンオフを選択
・信号を受けてハンドが開閉動作
・開閉位置や運転速度はWindowsPCとロボットハンド専用アプリケーションで事前に設定
デジタル出力0 デジタル出力1 パターン1 L L パターン2 H L パターン3 L H パターン4 H H 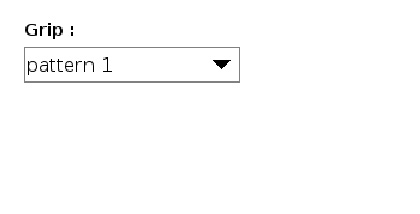
2.3. 設定項目
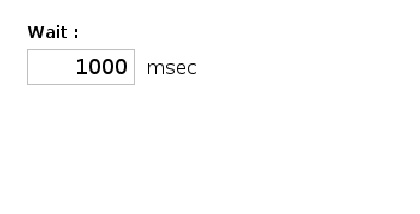
待ち時間設定
・ハンドが把持してからアームを動かすように時間を調整
・待ち時間を0にすれば、ハンドの爪先を動かしつつアームを上下に動かすことも可能
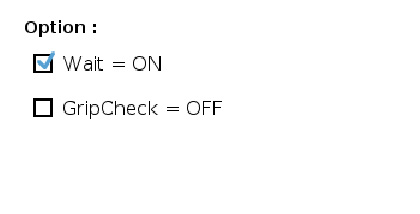
把持チェック
・ハンドが出力するグリップエラー信号をデジタル入力で監視
・ワークの把持に失敗すると、ポップアップを表示してロボットを停止
3. 通信制御
通信制御でできること
- 爪位置、把持力、動作速度を通信で設定
- 状態照会コマンドによる把持動作チェック
3.1. 接続
eシリーズの接続
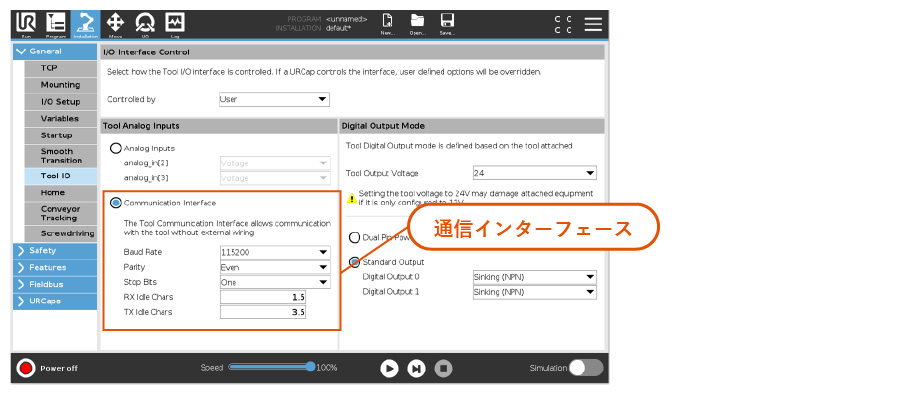
- eシリーズはツール先端のアナログ端子を通信端子に設定
通信インターフェース
- ボーレート:115200[bps]
- パリティビット:偶数
- ストップビット:1
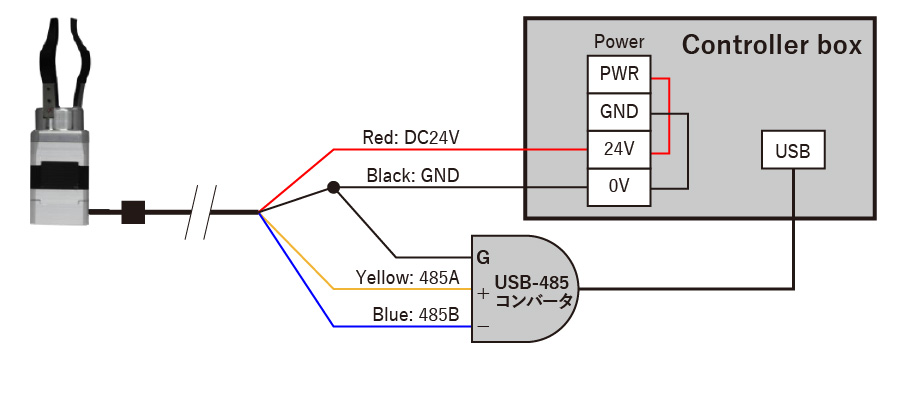
CBシリーズへの接続
- CBシリーズは別途USB-RS485コンバータを用意し、コントローラボックスと接続する。
【関連ページ】 Q.ユニバーサルロボットとの接続で、どのような通信・制御ができますか? - 設置設定画面の “Use USB to RS485 Converter” をチェック
3.2. 設定項目
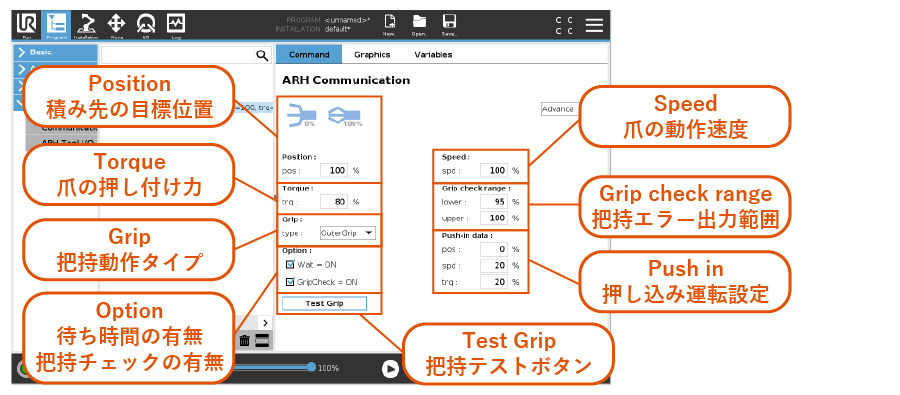
3.3. 設定内容
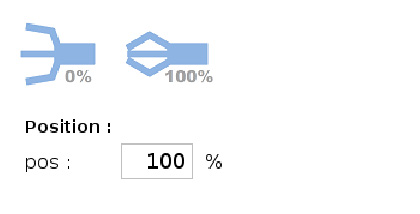
Position
ハンド目標位置
・全開は0%、全閉が100%
・爪先位置を0~100の分解能で指定
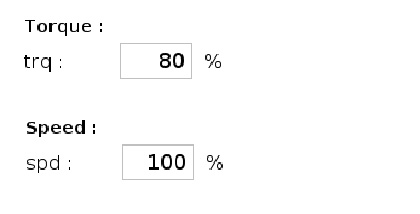
TorqueとSpeed
把持力と動作速度
・速度:10~400%
・出力トルク:15~100%
見積・ご相談
ロボットハンド設定や各メーカーロボットへの取り付け・接続などのご質問やご相談、見積りなどお気軽にお問い合わせください。